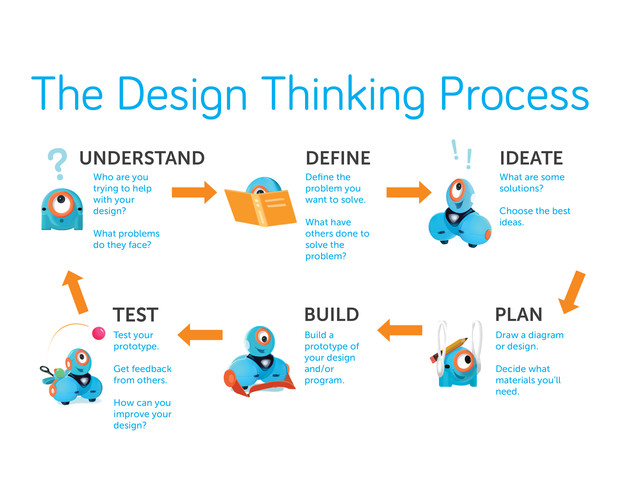
Classroom Best Practice Bring Design Thinking Principles to Your STEM Program Read More » February 23, 2024